Seakeeper 2 Operation Manual (90489-3); S/N 2-232-1564 to Current
2.1 System Overview Introduction
Reference Documents
The Seakeeper 2 uses gyroscopic principles to reduce boat roll motions in waves and wakes independent of boat speed. In installations involving multiple Seakeepers, each Seakeeper operates independently of one another; therefore this manual only discusses the operation of a single unit.
Reduction of boat roll is a function of the boat’s displacement, transverse metacentric height (GMT), and hull damping as well as the operating conditions (speed and heading with respect to waves) and sea state. Seakeeper’s active control regulates the hydraulic brake to ensure the Seakeeper’s anti-roll torque is maximized irrespective of hull characteristics or operating conditions.
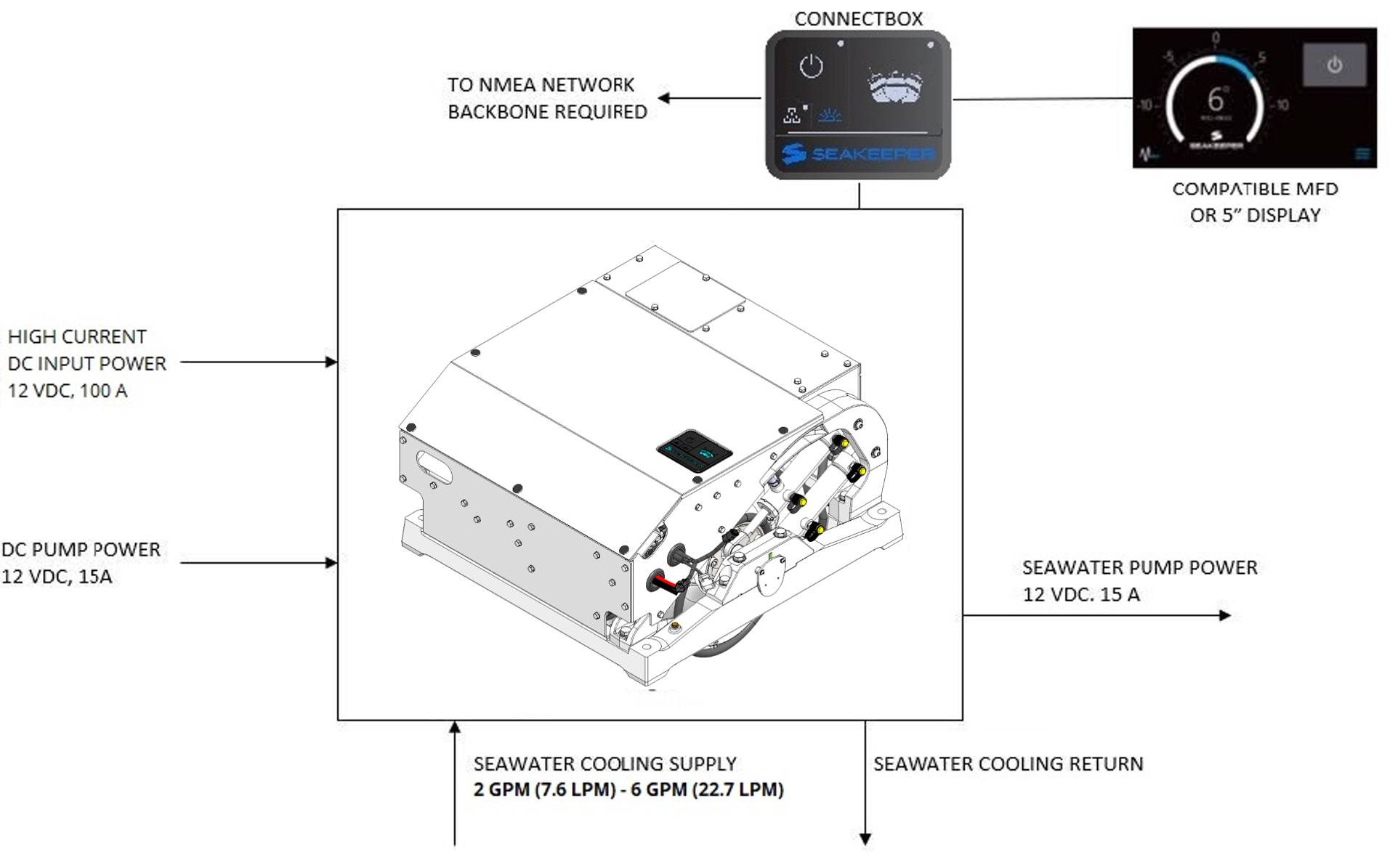
Operation of the Seakeeper 2 requires mechanical, electrical, and plumbing interfaces with the boat. Figure 1 illustrates the interconnection of these components and their interface with the boat. The Seakeeper 2 requires a connection to a display to support the Seakeeper Application; display options include a compatible MFD or Seakeeper 5” Touch Display.
Seakeeper 2 technical specifications provided in Section 6: Specifications and Summary, list the power consumption, total weight, and dimensions of the major components. Gyroscopic principals that apply to boat roll control are discussed on Seakeeper’s website at www.seakeeper.com. The Seakeeper website also contains videos of Seakeeper operation and a variety of different boats operating in waves with the Seakeeper on and off. It is recommended that the reader play these videos prior to reading the remainder of this manual.

There is a large torque about the gimbal axis when the Seakeeper is precessing. Seakeeper cover panels are provided to prevent personnel or equipment from contacting the Seakeeper while it is in operation. These covers should not be stood on or have anything placed on top. The covers should always be in place during operation. If it is ever necessary to touch the Seakeeper while the flywheel is spinning, the Seakeeper must be locked at the display to stop the Seakeeper from precessing. Seakeeper maintenance should not be attempted unless the Seakeeper is locked and the flywheel has stopped spinning.
Seakeeper 2 technical specifications provided in Section: Specifications and Summary, list the power consumption, total weight, and dimensions of the major components. Gyroscopic principals that apply to boat roll control are discussed on Seakeeper’s website at www.seakeeper.com. The Seakeeper website also contains videos of Seakeeper operation and a variety of different boats operating in waves with the Seakeeper on and off. It is recommended that the reader play these videos prior to reading the remainder of this manual.
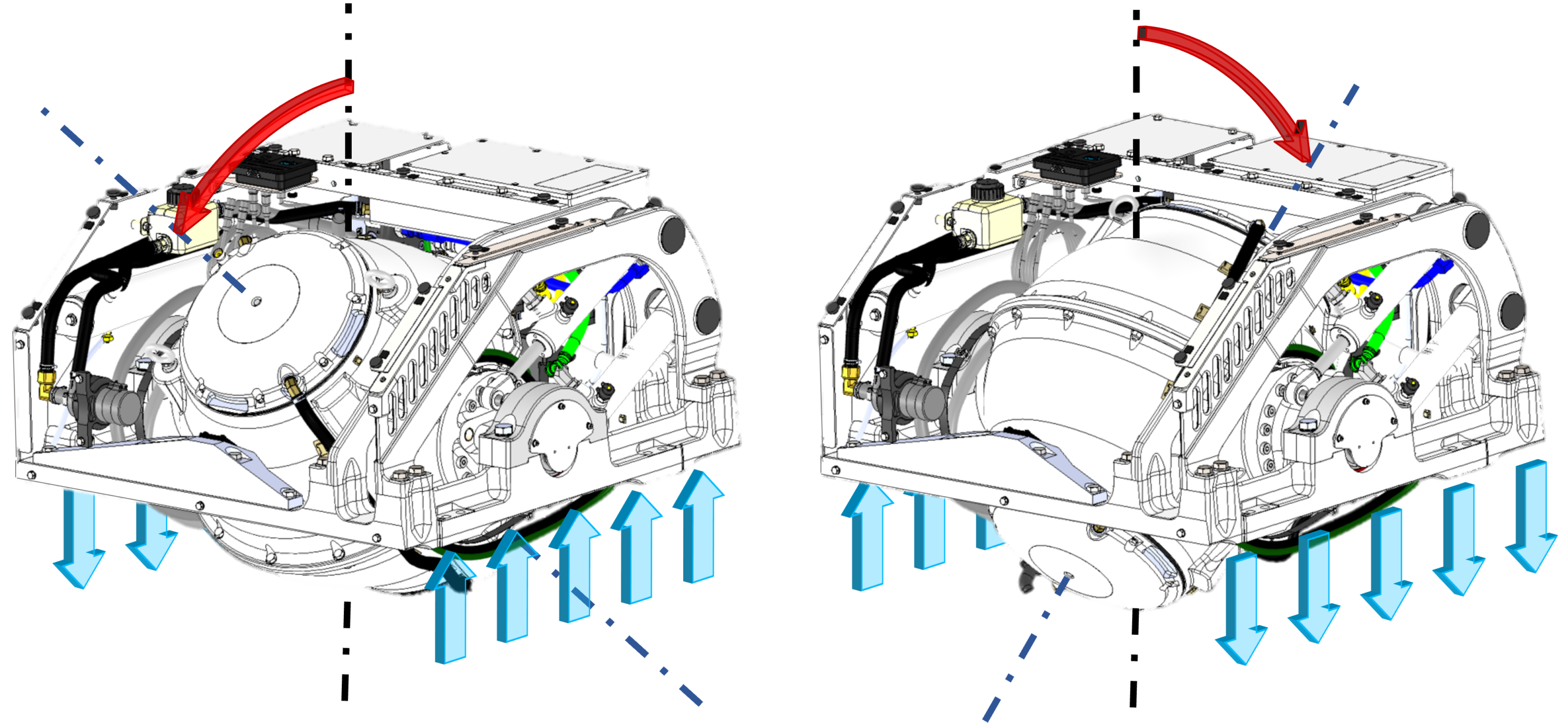
The gimbal angle and the rate of rotation about the gimbal axis (termed precession rate) play an important role in its operation. These parameters are illustrated in the figure below. At zero degree gimbal angle, the sphere is vertical; it can precess a maximum of +/- 67 degrees about this position. The amount of torque that the Seakeeper exerts on a boat’s hull to counter the wave induced roll is directly proportional to the precession rate. The farther the Seakeeper is from vertical (zero degrees) the lower the anti-roll torque. The vertical arrows in Figure 2 illustrate the direction of the forces that the Seakeeper exerts on the boat’s hull to damp roll motion.
Seakeeper Precession
Seakeeper precession is actively controlled by an electronic controller and a hydraulic brake throughout each roll cycle so the Seakeeper supplies the maximum anti-roll torque and limits mechanical contact with the hard stops that limit the maximum gimbal angle travel to +/- 67 degrees.
Safe Boat Operation
Boat operators are advised that the Seakeeper’s sole function is to dampen a boat’s cyclic roll motions. The Seakeeper is not, and is not intended to be, a substitute for adequate hull stability about the pitch, roll and yaw axes and the Seakeeper is not designed to prevent any instability due to improper boat operation, including, without limitation, any aggressive maneuvers at high speed. During aggressive maneuvers at high speed, the Seakeeper outputs a constant pitch moment which can create a small bow-down or bow-up trim change.
Improper boat operation including, without limitation, aggressive maneuvers at high speed can result in the boat becoming unstable. If you intend to operate the boat in such a manner, you should lock the Seakeeper in the vertical position before operating the boat in that manner. This is easily accomplished by turning the boat to starboard at slow speed in the Stabilize mode. After turning to starboard for 5 seconds, turn the Stabilize mode off while continuing to turn and then go to the Service Page on the display and confirm the Gyro Angle is within +10 degrees of 0 degrees.